

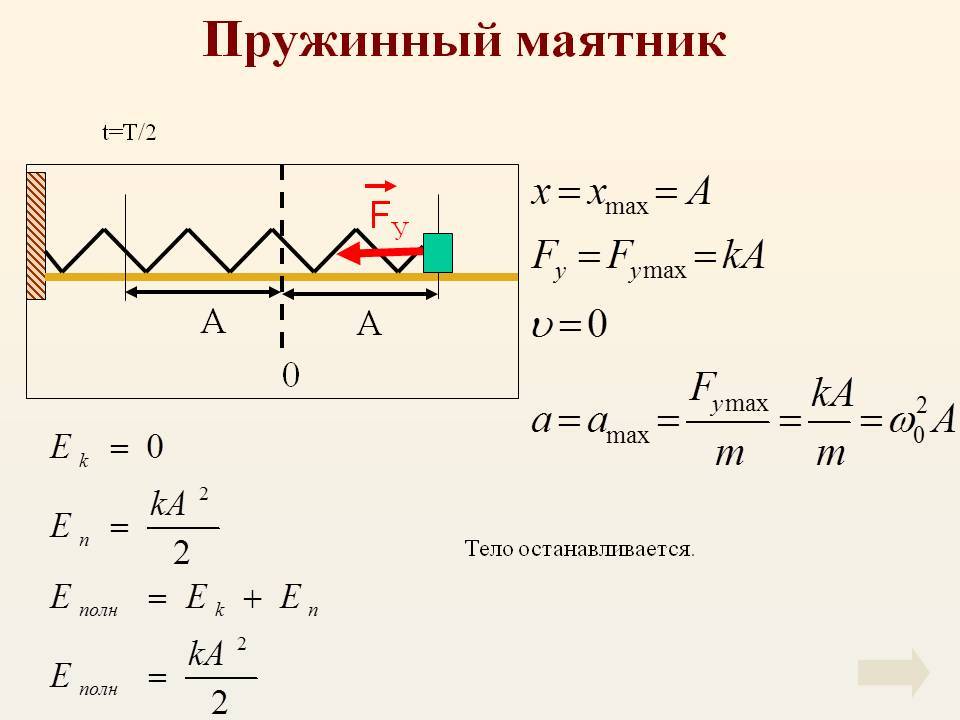
Максимальная кинетическая энергия груза на пружине
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия.
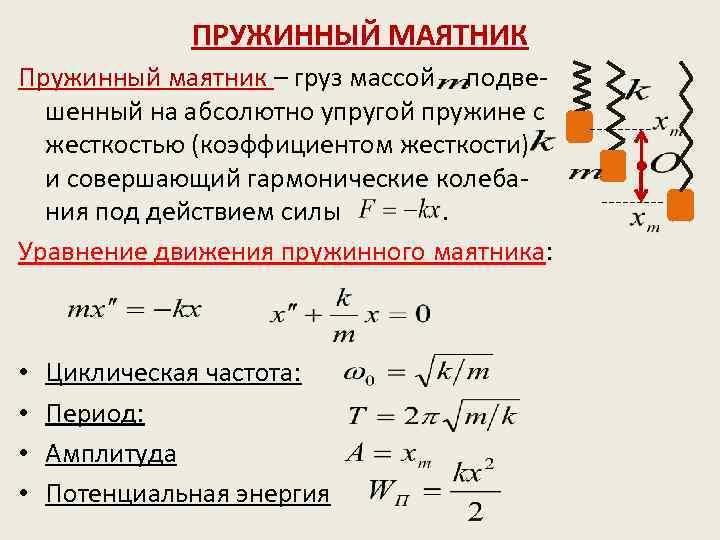
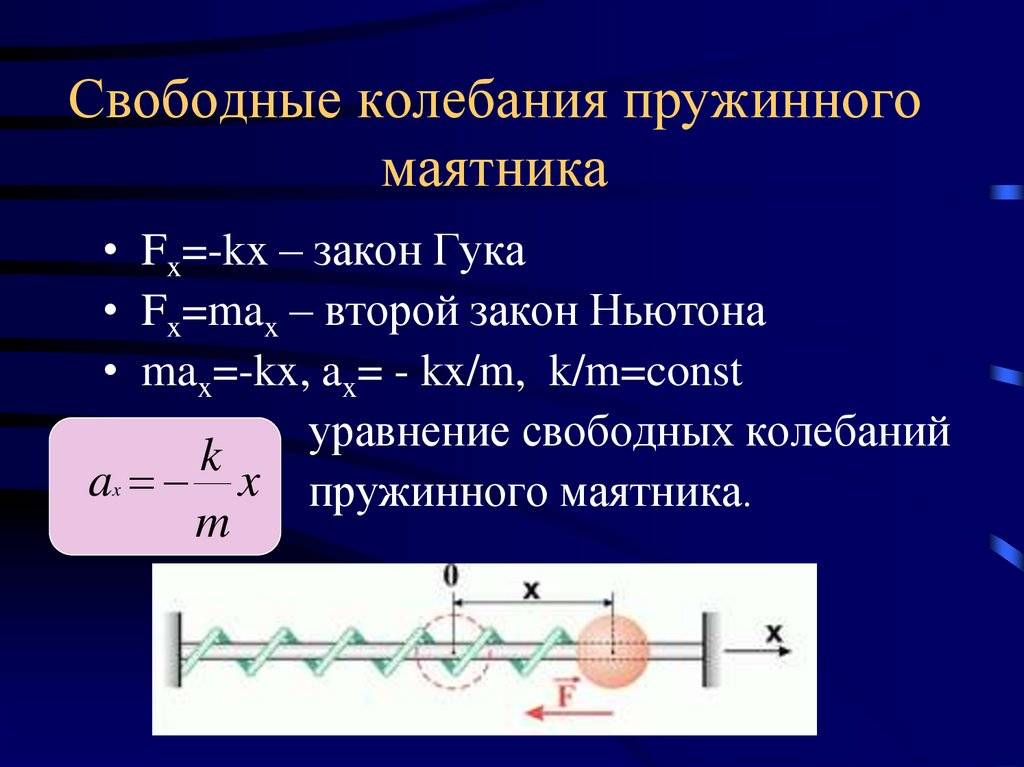
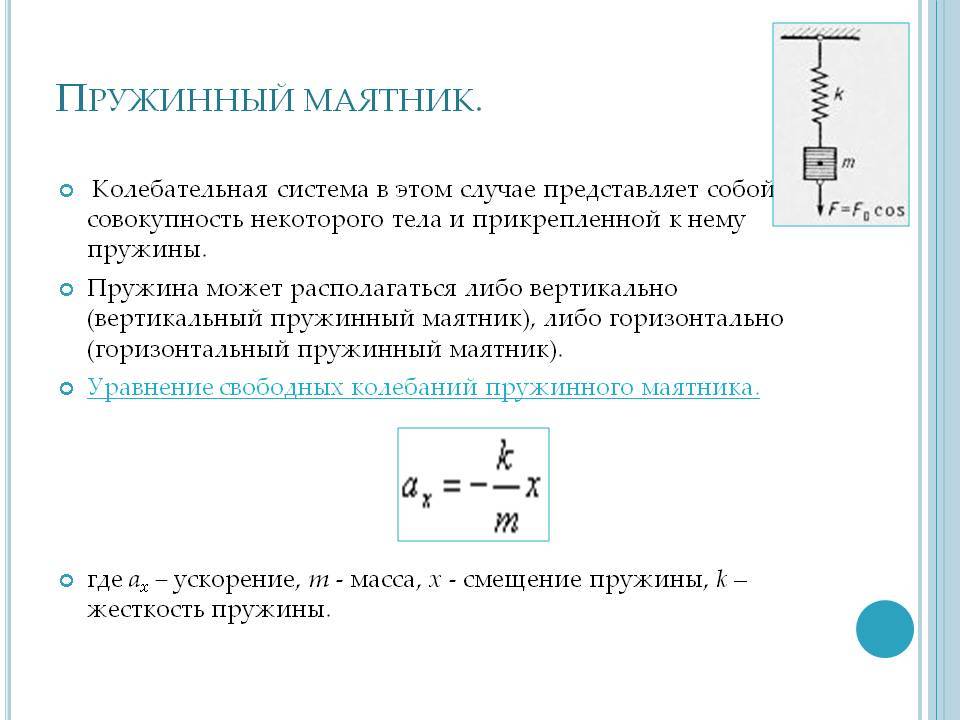
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению:
В этом соотношении ω – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука:
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими .
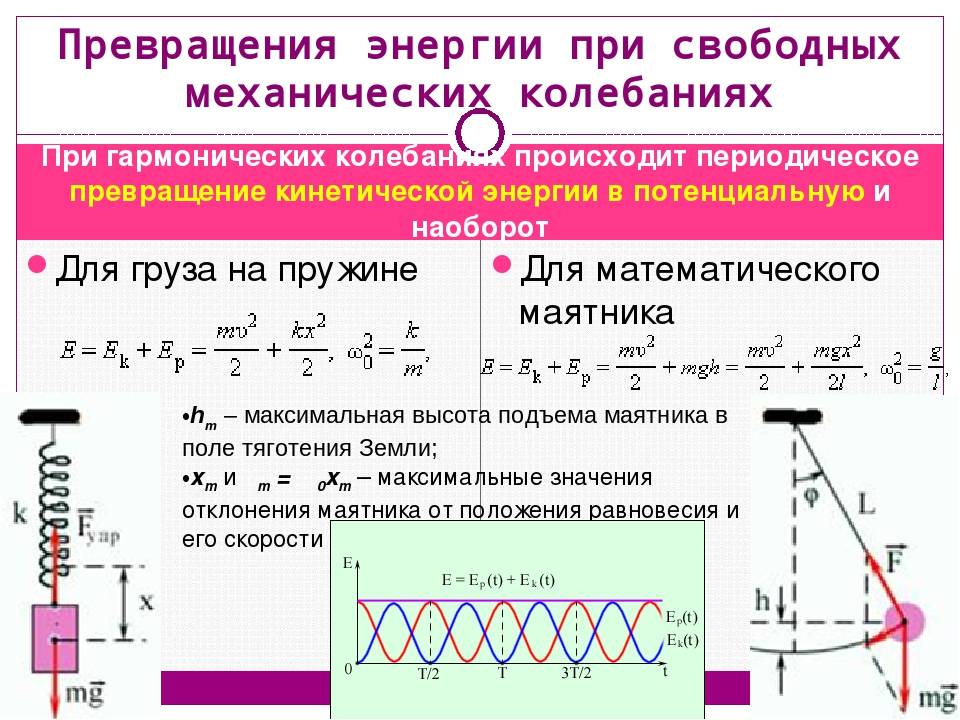
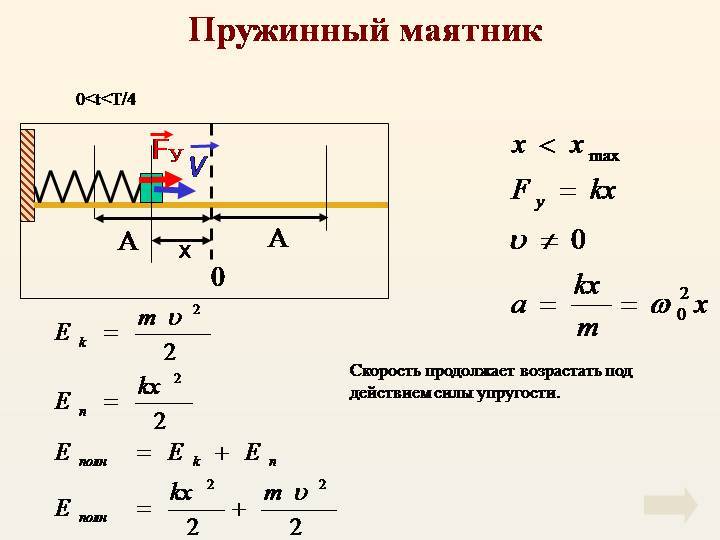
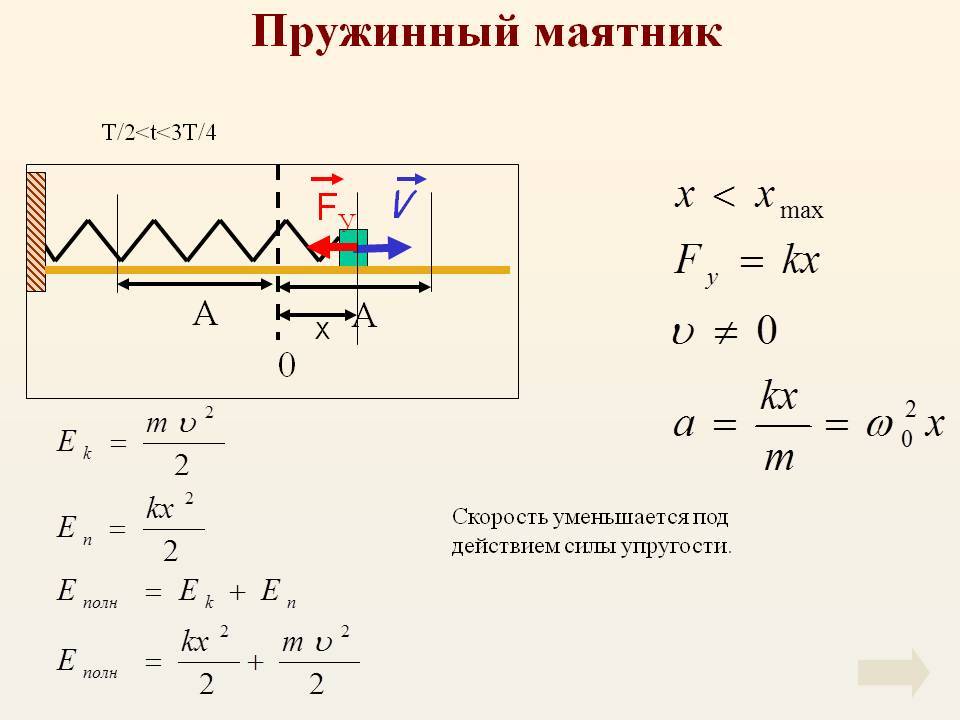
При свободных механических колебаниях кинетическая и потенциальная энергии изменяются периодически. При максимальном отклонении тела от положения равновесия его скорость, а следовательно, и кинетическая энергия обращаются в нуль. В этом положении потенциальная энергия колеблющегося тела достигает максимального значения. Для груза на горизонтально расположенной пружине потенциальная энергия – это энергия упругих деформаций пружины.
Когда тело при своем движении проходит через положение равновесия, его скорость максимальна. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией. Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии. При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и т. д.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот.
Если в колебательной системе отсутствует трение, то полная механическая энергия при свободных колебаниях остается неизменной.
Для груза на пружине:
Запуск колебательного движения тела осуществляется с помощью кнопки Старт . Остановить процесс в любой момент времени позволяет кнопка Стоп .
Графически показано соотношение между потенциальной и кинетической энергиями при колебаниях в любой момент времени
Обратите внимание, что в отсутствие затухания полная энергия колебательной системы остается неизменной, потенциальная энергия достигает максимума при максимальном отклонении тела от положения равновесия, а кинетическая энергия принимает максимальное значение при прохождении тела через положение равновесия
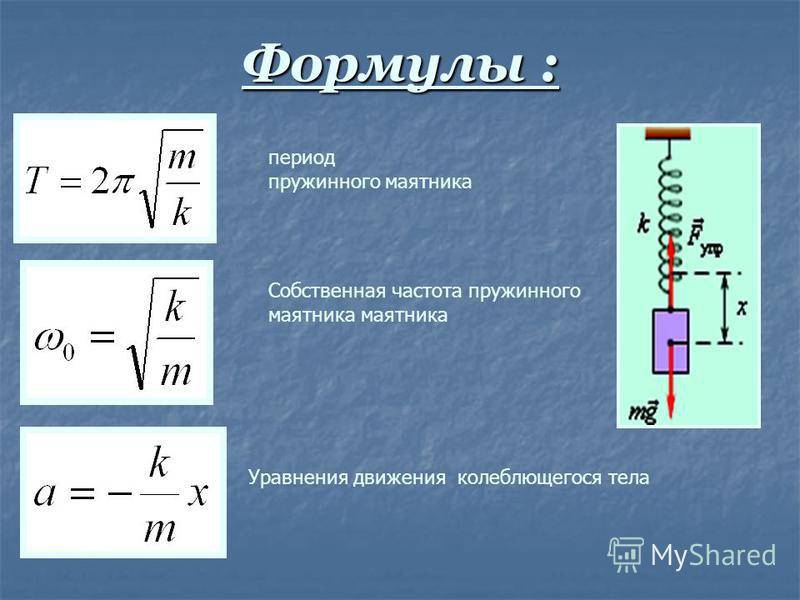
Задание 7. Верхний конец пружины идеального пружинного маятника неподвижно закреплён, как показано на рисунке. Масса груза маятника равна m, жёсткость пружины равна k. Груз оттянули вниз на расстояние x от положения равновесия и отпустили с начальной скоростью, равной нулю. Формулы А и Б позволяют рассчитать значения физических величин, характеризующих колебания маятника.
Установите соответствие между формулами и физическими величинами, значение которых можно рассчитать по этим формулам.
К каждой позиции первого столбца подберите соответствующую позицию из второго столбца и запишите в таблицу выбранные цифры под соответствующими буквами.
1) амплитуда колебаний скорости
2) циклическая частота колебаний
3) максимальная кинетическая энергия груза
4) период колебаний
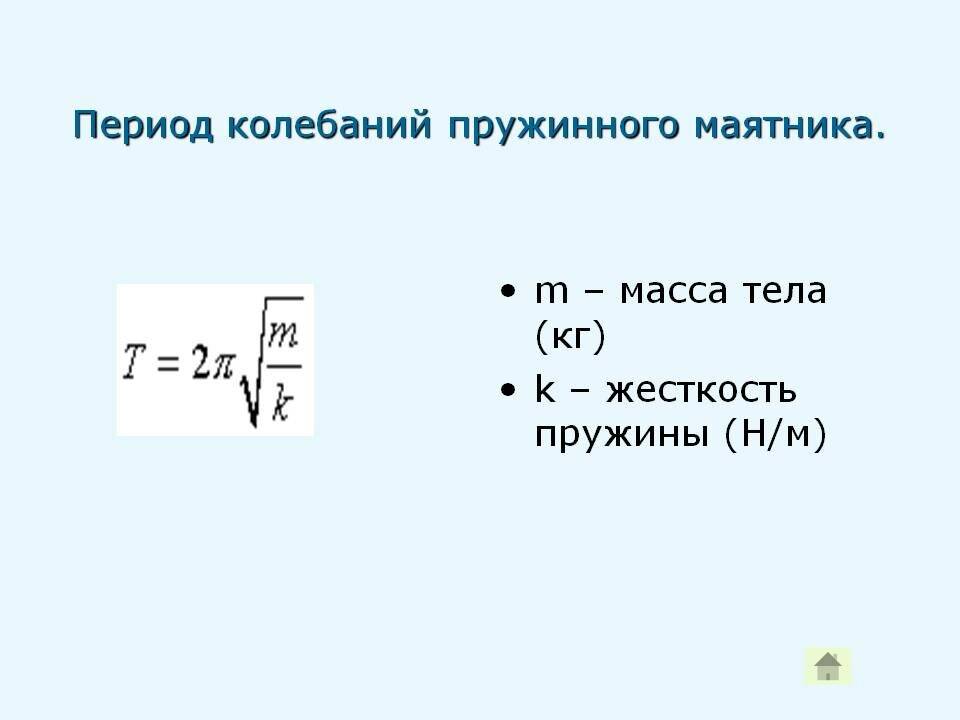
А) Имеем пружинный маятник массой m и жесткостью пружины k, тогда период свободных колебаний этого маятника определяется по формуле
Б) Для пружинного маятника известны формулы кинетической энергии
Пружинный маятник, состоящий из груза и лёгкой пружины, совершает колебания. В момент, когда груз находится в крайнем положении, его немного подталкивают вдоль оси пружины в направлении от положения
равновесия. Как в результате этого изменяются максимальная кинетическая энергия груза маятника и частота его колебаний?
Для каждой величины определите соответствующий характер изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
| Максимальная кинетическая энергия груза маятника | Частота колебаний маятника |
Груз подтолкнули от положения равновесия, откуда следует, что амплитуда колебаний груза увеличится. При этом увеличится также и максимальная потенциальная энергия пружины. По закону сохранения энергии, это приведет к увеличению максимальной кинетической энергии груза маятника.
Период и частота пружинного маятника зависят только от массы груза и жесткости пружины. Таким образом, при увеличении амплитуды колебаний груза, частота колебаний маятника не изменится.
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину \( x \), потребуется приложить внешнюю силу \( F_{вн} \), которая равна:
где \( k \) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации \( \mathbf{x} \) всегда направлен противоположно силе сопротивления пружины (или силе упругости) \( \mathbf{F} \), а потому в векторную формулировку закона Гука обычно входит знак “минус”:
Растягиваем и сжимаем пружины
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности \( k \) в законе Гука \( F=kx \) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен \( mg \), где \( g \) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка \( mg/4 \).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:
т.е. коэффициент упругости равен:
Подставляя значения, получим:
Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:
Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.
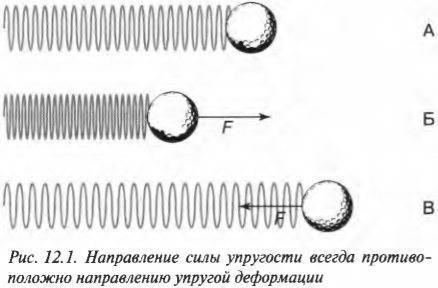
Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них – синус и косинус – являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Читать также: Каким сверлом сверлить плитку керамическую
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
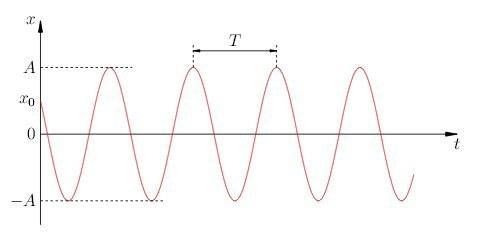
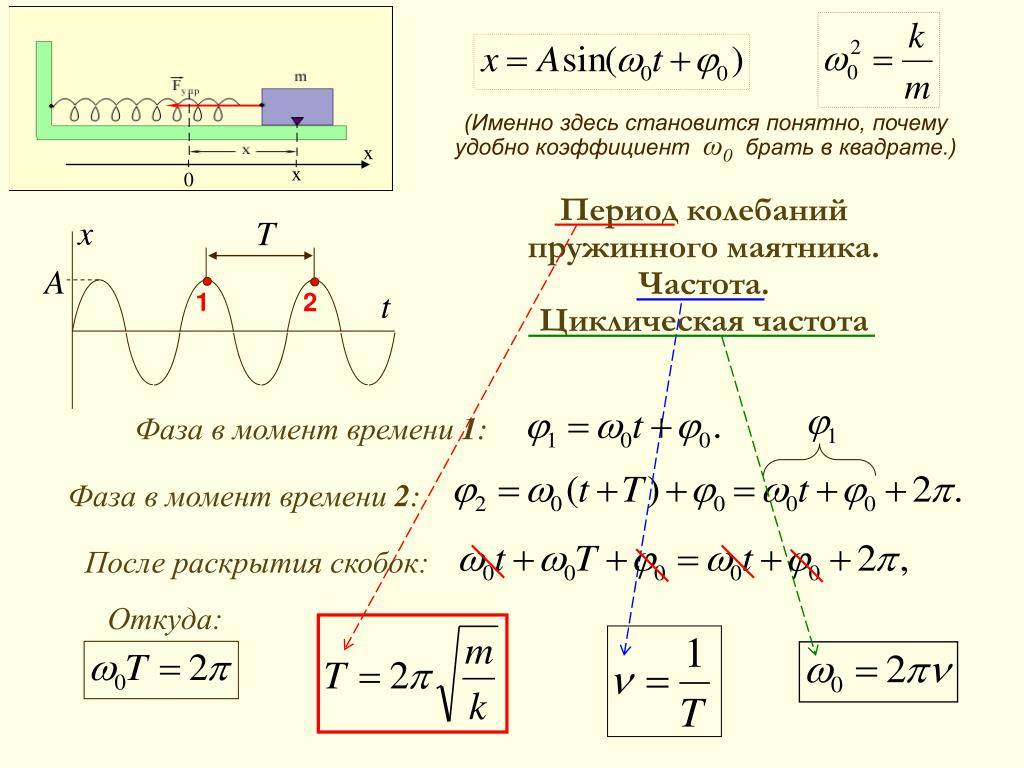
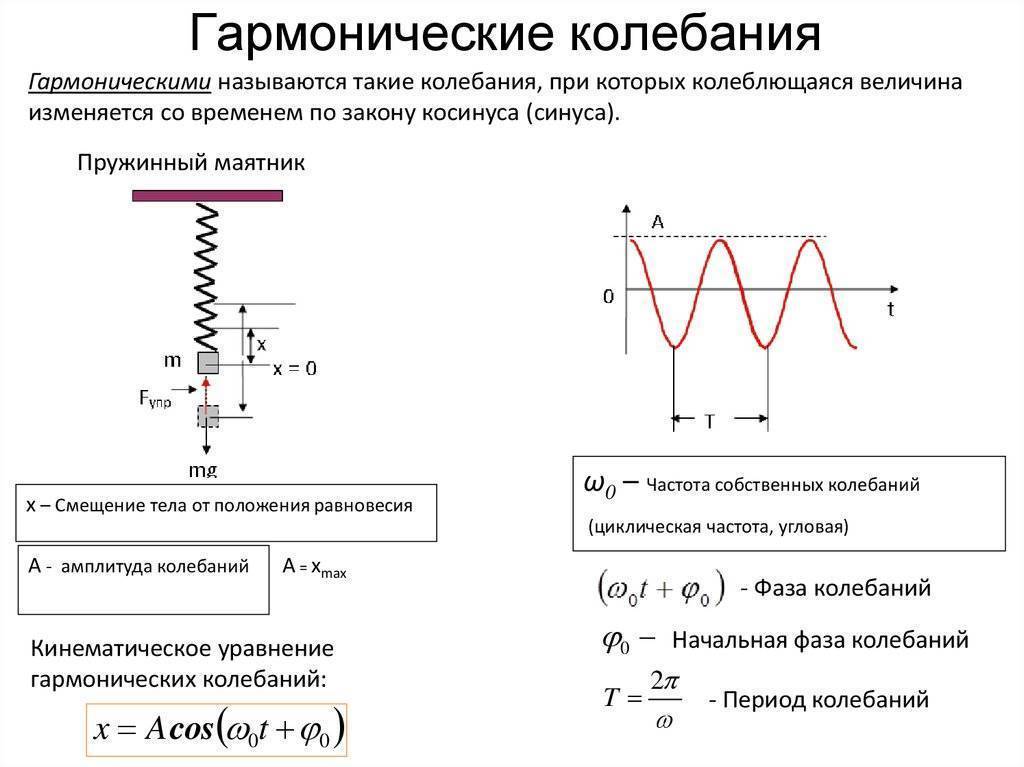
Гармонические колебания – это колебания, при которых координата зависит от времени по гармоническому закону:
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому – амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой. Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
|
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.


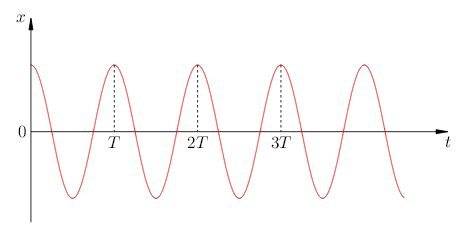
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
|
| Рис. 2. Закон косинуса |
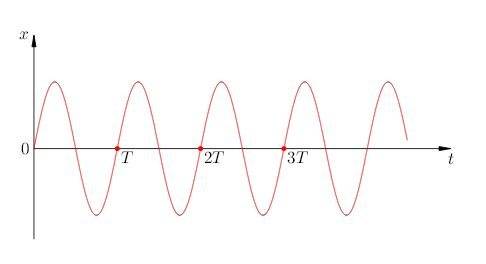
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
|
| Рис. 3. Закон синуса |
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
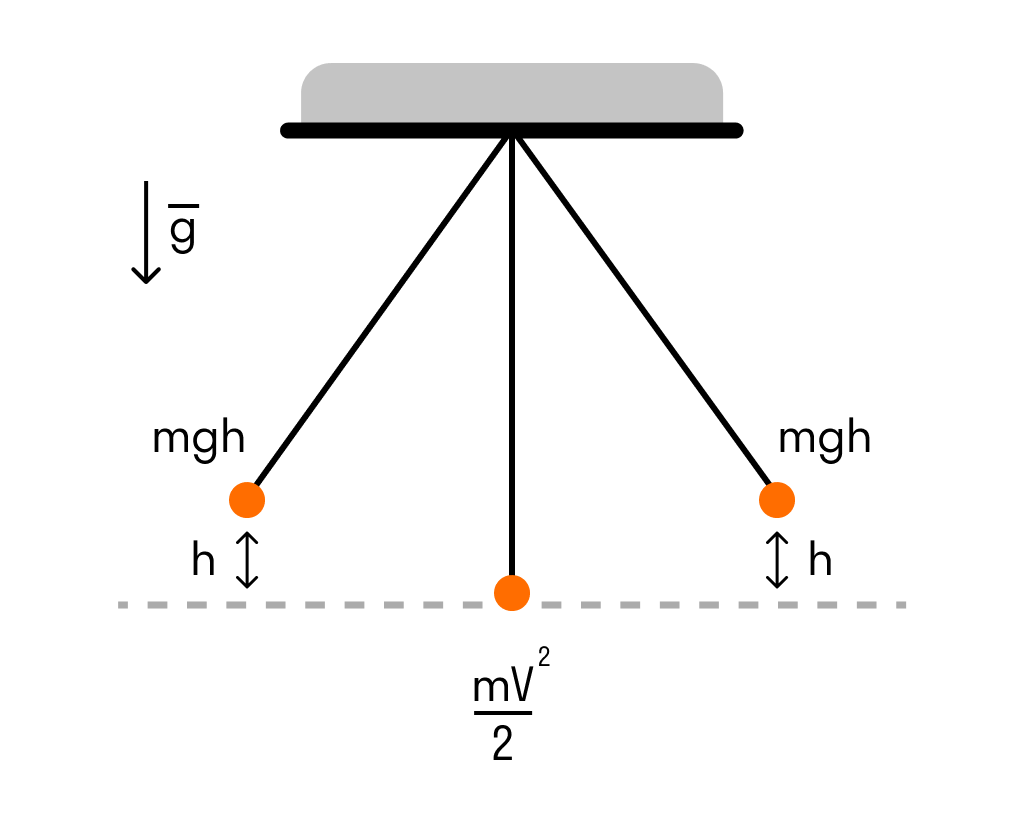
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
Слайды и текст этой презентации
Исследование зависимости периода колебаний пружинного маятника от массы груза, жёсткости пружины, амплитуды колебаний и температуры воздуха.
Работа учащихся 9 класса МОУ «Старовыслинская ООШ»Шингалова Радия и Надукова Дениса
2011г. Учитель: Потапов Н.А.
Цель нашей работы:
Исследовать зависимость периода колебаний пружинного маятника от массы груза, жёсткости пружины, амплитуды колебаний и температуры воздуха.
Введение.
В настоящее время в технике и быту используются различные виды пружины. Твердые тела и материалы, которыми располагает человечество, во многом определяет уровень его технического развития. Изучая свойства твердых тел, мы заинтересовались упругими свойствами пружины и решили исследовать их.
Подготовка к эксперименту
Для проведения экспериментов подобрали следующее оборудование: штатив с 2-мя лапками, пружина №1 (к1=6,4 Н/м), пружина №2 (к2=21,6Н/м), набор грузов массой по 100г, линейка, секундомер, динамометр.
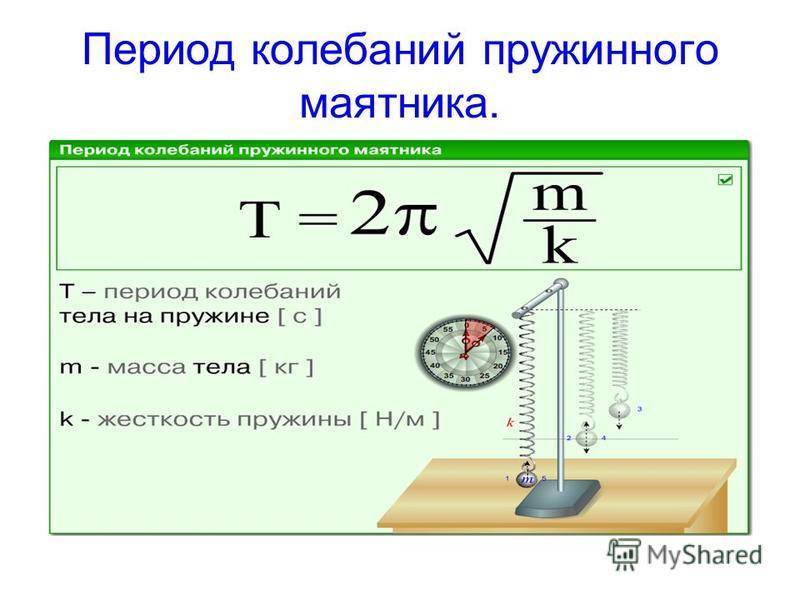
ПЕРИОД КОЛЕБАНИЯ
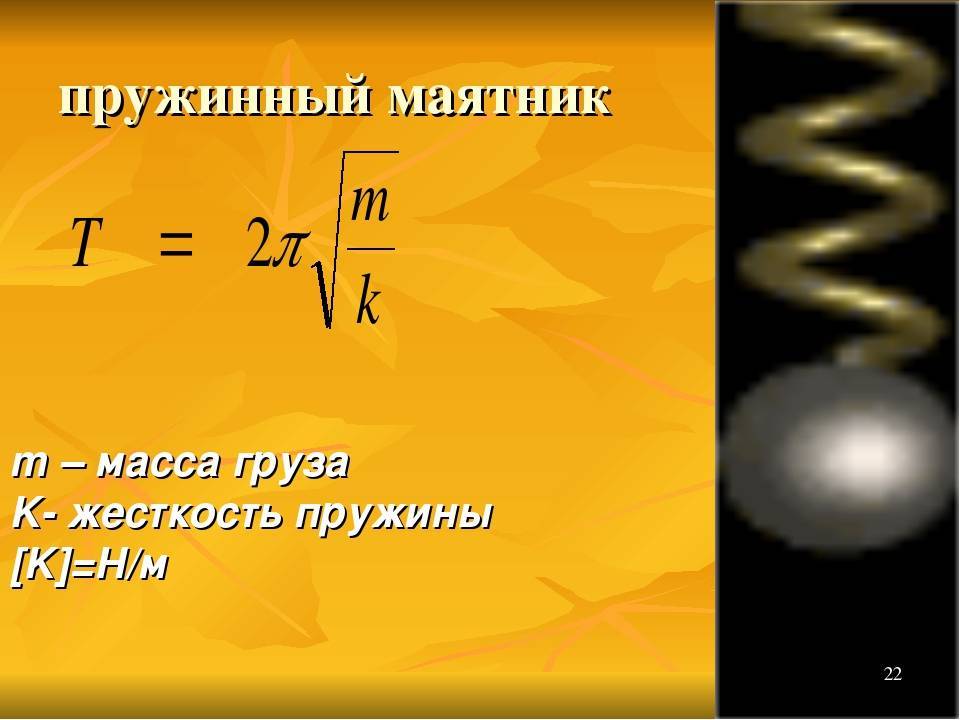
Одной из важных характеристик колебательного движения является период колебания – интервал времени, в течение которого происходит одно полное колебание. Связь периода колебаний пружинного маятника от массы груза и жёсткости пружины известна:
План проведения эксперимента:
Приготовить приборы и оборудования.Исследовать зависимость периода колебаний пружинного маятника от массы груза, жёсткости пружины, амплитуды и температуры воздуха. Заполнение таблиц измерений.Вычерчивание графиков зависимостей.Анализ графиков зависимостей периода от разных параметров. Обобщение результатов.
Эксперимент 1
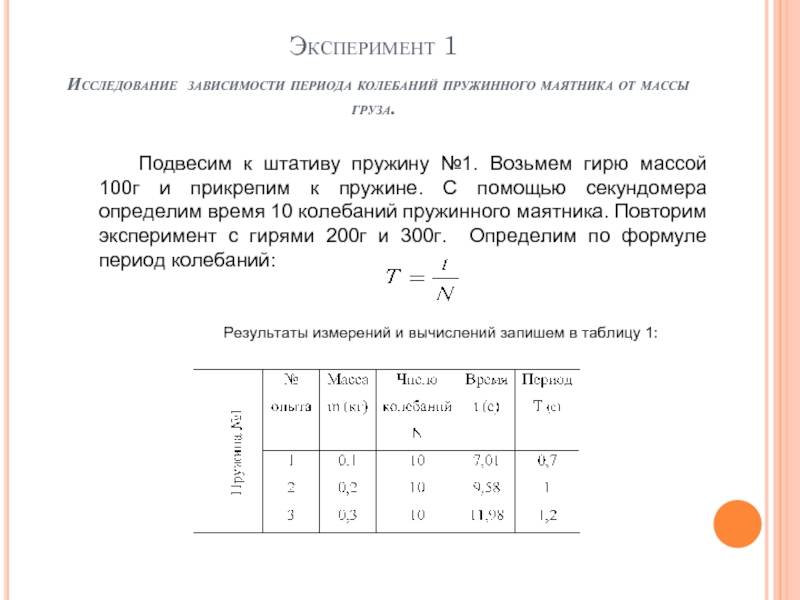
Исследование зависимости периода колебаний пружинного маятника от массы груза.
Подвесим к штативу пружину №1. Возьмем гирю массой 100г и прикрепим к пружине. С помощью секундомера определим время 10 колебаний пружинного маятника. Повторим эксперимент с гирями 200г и 300г. Определим по формуле период колебаний:
Результаты измерений и вычислений запишем в таблицу 1:
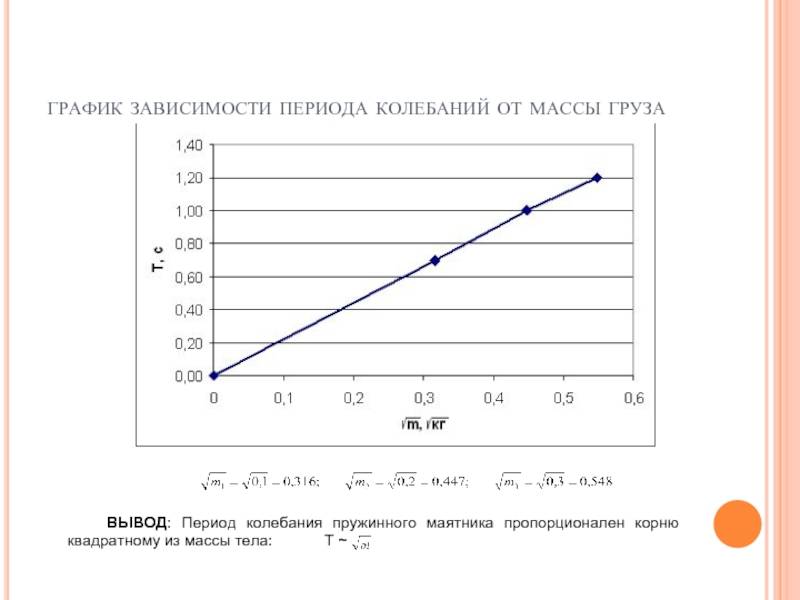
график зависимости периода колебаний от массы груза
ВЫВОД: Период колебания пружинного маятника пропорционален корню квадратному из массы тела: Т ~
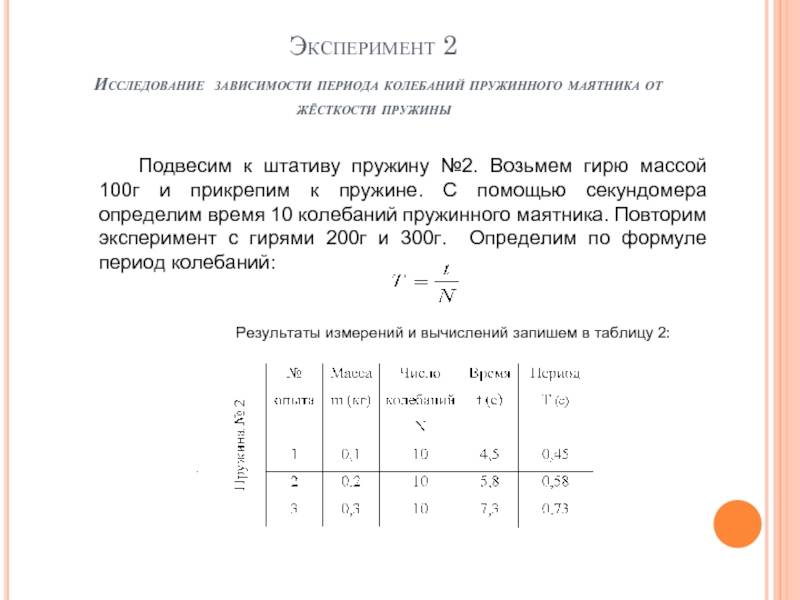
Эксперимент 2
Исследование зависимости периода колебаний пружинного маятника от жёсткости пружины
Подвесим к штативу пружину №2. Возьмем гирю массой 100г и прикрепим к пружине. С помощью секундомера определим время 10 колебаний пружинного маятника. Повторим эксперимент с гирями 200г и 300г. Определим по формуле период колебаний:
Результаты измерений и вычислений запишем в таблицу 2:
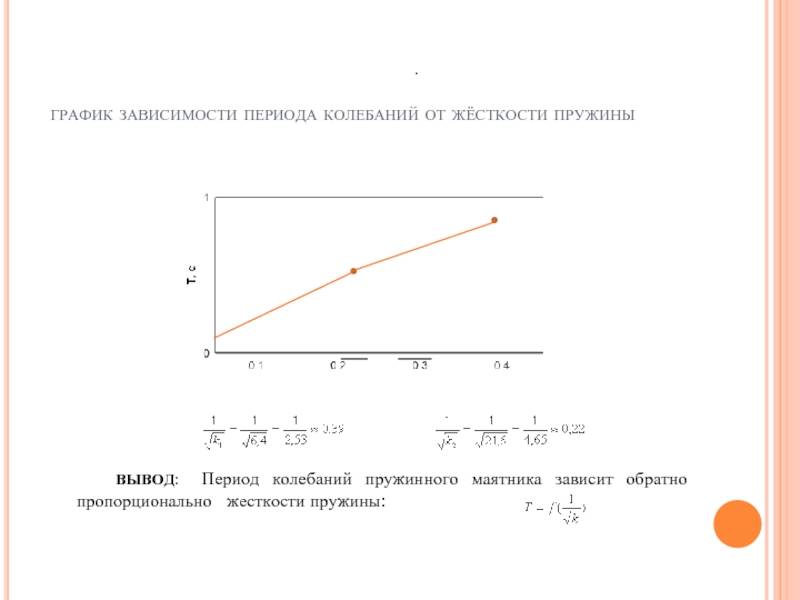
график зависимости периода колебаний от жёсткости пружины
ВЫВОД: Период колебаний пружинного маятника зависит обратно пропорционально жесткости пружины:
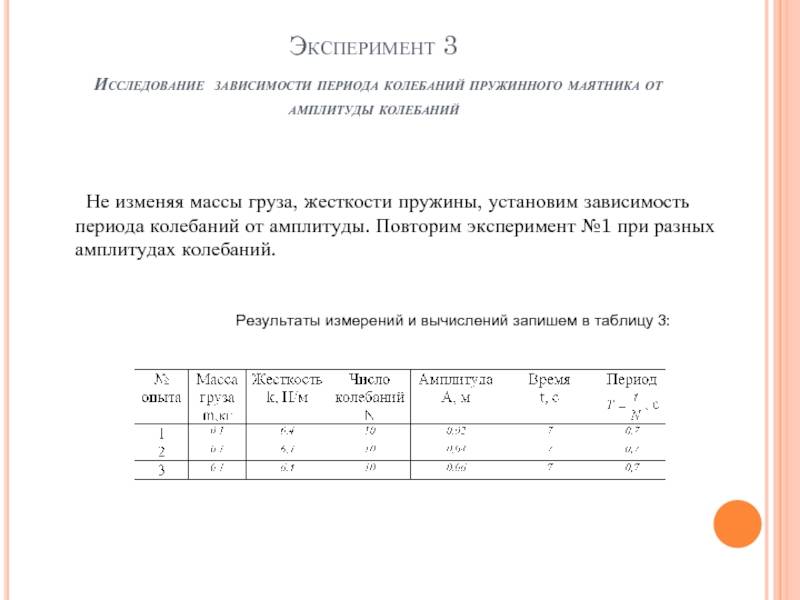
Эксперимент 3
Исследование зависимости периода колебаний пружинного маятника от амплитуды колебаний
Результаты измерений и вычислений запишем в таблицу 3:
Не изменяя массы груза, жесткости пружины, установим зависимость периода колебаний от амплитуды. Повторим эксперимент №1 при разных амплитудах колебаний.
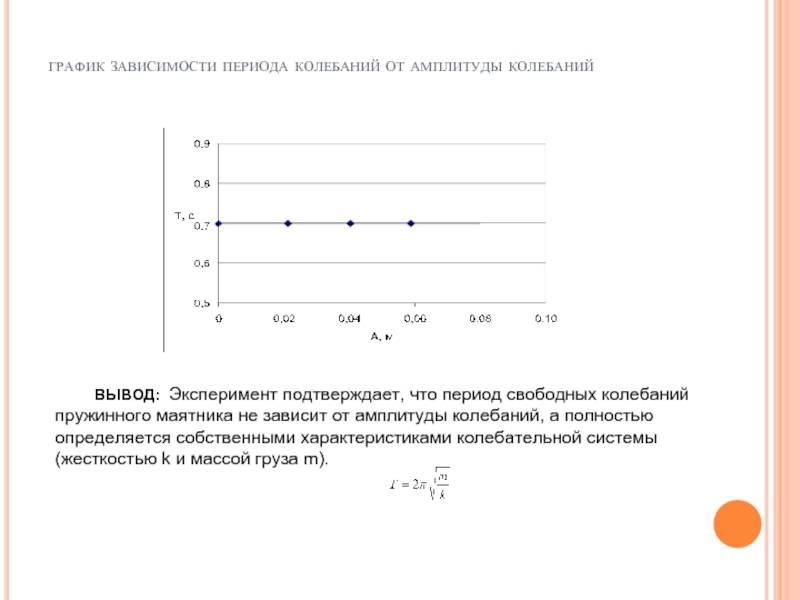
график зависимости периода колебаний от амплитуды колебаний
ВЫВОД: Эксперимент подтверждает, что период свободных колебаний пружинного маятника не зависит от амплитуды колебаний, а полностью определяется собственными характеристиками колебательной системы (жесткостью k и массой груза m).
Эксперимент 4
Исследование зависимости периода колебаний пружинного маятника от температуры.
Для исследования зависимости периода колебаний пружинного маятника от температуры повторили эксперимент №1 во дворе школы при другой температуре ( t= -20 0С ).
ВЫВОД: Период колебания пружинного маятника не зависит от температуры.
Обобщение
В результате экспериментов мы выяснили, что период колебаний пружинного маятника зависит от массы тела, жёсткости пружины и не зависит от амплитуды колебаний и температуры.
Литература:
Учебник по физике для 9 класса средней школы Н.М. Шахмаева, С.Н. Шахмаева, Д.Ш. Шодиева,-М. Просвещение.1990г. Кикоин И.К., Кикоин А.К. Физика. Учебник для 9кл.-М. Просвещение, 1990г.Громов С.В. , Родина Н.А.. Физика. Учеб. Для 8кл.-М. Просвещение. 2000г.Сеть Интернет.


Колебания пружинного маятника • Задачи
Несмотря на свою кажущуюся простоту, маятник на пружинке — система, довольно богатая на явления. Это один из самых простых примеров симпатичного явления — резонанса Ферми. Заключается оно вот в чем. Вообще говоря, если грузик как-то оттянуть и отпустить, то он будет колебаться и по вертикали, и по горизонтали. Эти два типа колебания будут просто накладываться и не мешать друг другу. Но если периоды вертикальных и горизонтальных колебаний связаны соотношением Tx = 2Ty, то горизонтальные и вертикальные колебания, словно против своей воли, начнут постепенно превращаться друг в друга, как на анимации справа. Энергия колебаний будет как бы перекачиваться из вертикальных колебаний в горизонтальные и наоборот.
Выглядит это так: вы оттягиваете грузик вниз и отпускаете его. Он поначалу колеблется только вверх-вниз, затем сам по себе начинает раскачиваться в стороны, на какое-то мгновение колебание становится почти полностью горизонтальным, а потом снова возвращается к вертикальному. Удивительно, но строго вертикальное колебание оказывается неустойчивым.
Объяснение этого замечательного эффекта, а также магического соотношения Tx:Ty = 2:1, вот в чем. Обозначим через x и y отклонения грузика от положения равновесия (ось y направлена вверх). При таком отклонении потенциальная энергия вырастает на величину

Это — точная формула, она годится для любых отклонений, больших и маленьких. Но если x и y малы, существенно меньше L, то выражение приблизительно равно

плюс другие слагаемые, содержащие еще более высокие степени отклонений. Величины Uy и Ux — это обычные потенциальные энергии, из которых получаются вертикальные и горизонтальные колебания.
А вот выделенная синим цветом величина Uxy — это особая добавка, которая порождает взаимодействие между этими колебаниями. Благодаря этому маленькому взаимодействию колебания по вертикали влияют на горизонтальные колебания и наоборот.
Это становится совсем прозрачно, если провести вычисления дальше и написать уравнение колебаний по горизонтали и вертикали:
где введены обозначения

Без синей добавки у нас были бы обычные независимые колебания по вертикали и горизонтали с частотами ωy и ωx. Эта добавка играет роль вынуждающей силы, дополнительно раскачивающей колебания. Если частоты ωy и ωx произвольны, то эта маленькая сила не приводит ни к какому существенному эффекту.
Но если выполняется соотношение ωy = 2ωx, наступает резонанс: вынуждающая сила для обоих типов колебаний содержит компоненту с той же частотой, что и само колебание. В результате эта сила медленно, но неуклонно раскачивает один тип колебаний и подавляет другой.
Именно так горизонтальные и вертикальные колебания перетекают друг в друга.
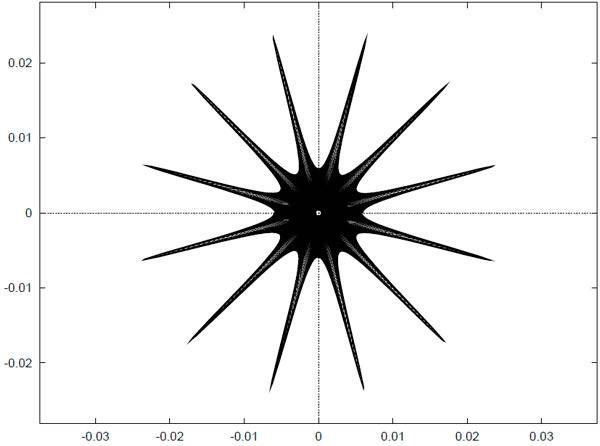
Дополнительные красоты возникают, если в этом примере по-честному учесть третье измерение. Будем считать, что грузик может сжимать-разжимать пружинку по вертикали и качаться, как маятник, в двух горизонтальных направлениях. Тогда, при выполнении условия резонанса, при взгляде сверху грузик выписывает звездчатую траекторию, как, например, на рис. 3.
Так получается потому, что плоскость колебания не остается неподвижной, а поворачивается — но не плавно, а как бы скачками. Пока колебание идет из стороны в сторону, эта плоскость более-менее держится, а поворот происходит за тот короткий промежуток, когда колебание почти вертикально.
Предлагаем читателям самостоятельно подумать, каковы причины этого поведения и от чего зависит угол поворота плоскости.
А желающие окунуться с головой в эту довольно-таки глубокую задачу могут полистать статью Stepwise Precession of the Resonant Swinging Spring, в которой не только приведен подробный анализ задачи, но и рассказывается о ее истории и о связи этой задачи с другими разделами физики, в частности с атомной физикой.
Какие бывают колебания?
Колебания подразделяются на гармонические и ангармонические, а также на периодические и непериодические. Логично было бы предположить, что в случае гармонических колебаний они совершаются согласно некоторой гармонической функции. Это может быть как синус, так и косинус. При этом в деле могут оказаться и коэффициенты сжатия-растяжения и увеличения-уменьшения. Также колебания бывают затухающими. То есть, когда на систему действует определенная сила, которая постепенно “тормозит” сами колебания. При этом период становится меньше, в то время как частота колебаний неизменно увеличивается. Очень хорошо демонстрирует такую вот физическую аксиому простейший опыт с использованием маятника. Он может быть пружинного вида, а также математического
Это неважно. Кстати, период колебаний в таких системах будет определяться разными формулами
Но об этом чуточку позже. Сейчас же приведем примеры.
Амплитуда результирующего колебания равна сумме амплитуд слагаемых колебаний
- Синфазные колебания усиливают друг друга!
- Интересно, что энергия суммарного колебательного движения, пропорциональная квадрату амплитуды, не равна сумме энергий каждого колебания по отдельности, ибо
2 Пусть j01 — j02 = (2k -1)p, где k = 0, 1, 2,… В этом случае говорят, что колебания происходят в противофазе. Векторная диаграмма выглядит следующим образом
- Если А1 > А2, то результирующее колебание происходит синфазно с первым колебанием. Но амплитуда результирующего колебания уменьшилась:
В этом случае говорят, что колебания ослабляют друг друга. Очевидно, что при А1 = А2 результирующая амплитуда вообще будет равной нулю. Это означает, что тело не будет двигаться вообще. Колебания погасили друг друга.
3 Во всех остальных случаях, когда колебания не будут синфазными или противофазными, мы будем видеть колебания с амплитудой, большей , но меньшей, чем .
Полученные результаты имеют бесчисленное множество применений. Забегая вперед, скажем, что если, например, в определенном месте пространства происходят звуковые колебания под действием двух источников, то результирующая громкость звука может оказаться меньше, чем громкость, создаваемая каждым источником в отдельности.
Если звуки, создаваемые каждым источником в отдельности, имеют одинаковую интенсивность, то при подходящих условиях эти звуки гасят друг друга, и можно сказать, что «звук + звук = молчание».
Возможны также условия, когда два пучка света, падающие на экран, дают не большую, а меньшую освещенность, чем каждый пучок в отдельности; возможен даже случай, когда «свет + свет = темнота». Но об этом позже…
§ 2 Сложение взаимно перпендикулярных колебаний
Рассмотрим сначала случай, когда материальная точка одновременно участвует в двух взаимно перпендикулярных колебаниях, имеющих одну частоту. Проблема заключается в определении траектории точки, которую мы будем в этом случае наблюдать.
Пусть одно колебание происходит по оси ОХ, другое – по OY .
- Нетрудно показать, то при сдвиге фаз эллипс вырождается в прямую на рисунке б:
- Мы будем видеть колебательное движение точки вдоль прямой, проходящей через начало координат, с амплитудой .
- При получаем траекторию на рисунке в:
- Траекторией будет эллипс, у которого главные оси совпадают с осями координат так, как показано на рисунке г , если
- Покажем это
- Разделив обе части каждого уравнения на А и В соответственно, получаем
- Возведем каждое уравнение в квадрат и сложим почленно:
Сдвиг по фазе определит в этом случае направление движения точки. Оно будет происходить по часовой стрелке, если , и против часовой стрелки, если .
Если амплитуды колебаний по осям ОХ и OY будут равны А = В, то эллипс преобразуется в окружность радиуса А = В: Важно заметить, что любое равномерное движение по окружности радиуса А с угловой скоростью может быть разложено на два взаимно перпендикулярных гармонических колебания с частотой. Движение по эллипсу тоже может быть разложено на два взаимно перпендикулярных колебания. Более сложной получается траектория точки, совершающей колебания во взаимно перпендикулярных направлениях, если частоты колебаний не равны
В частности, если частоты относятся как целые числа, траектория оказывается замкнутой линией. Такая траектория называются фигурой Лиссажу. Ниже приведены примеры фигур Лиссажу для некоторых значений и
Более сложной получается траектория точки, совершающей колебания во взаимно перпендикулярных направлениях, если частоты колебаний не равны. В частности, если частоты относятся как целые числа, траектория оказывается замкнутой линией. Такая траектория называются фигурой Лиссажу. Ниже приведены примеры фигур Лиссажу для некоторых значений и .
- §3 Сложение колебаний с близкими частотами, происходящими вдоль одной прямой
- Рассмотрим случай сложения двух колебаний одного направления и одинаковой амплитуды, частоты которых и очень мало отличаются друг от друга (
смещение положения равновесия точки
смещение положения равновесия точки
Задача 40713
Написать уравнение синусоидального гармонического колебания, если амплитуда скорости 63 см/с, период колебаний 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найти амплитуду ускорения, частоту колебаний.
Задача 40738
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 см/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 25 мм. Найти амплитуду скорости.
Задача 40739
Написать уравнение гармонического колебания, совершаемого по закону косинуса, если амплитуда ускорения 50 м/с2, частота колебаний 50 Гц, смещение точки от положения равновесия в начальный момент времени 0,25 мм. Найти амплитуду скорости.
Задача 26216
Написать уравнение гармонических колебаний с амплитудой 50мм, периодом 4с и начальной фазой П/4. Найти смещение точки от положения равновесия при t = 0 и t = 1,5 с.
Задача 26560
Уравнение незатухающих колебаний дано в виде: У = 4 ·10–2cos6πt, м. Найти смещение от положения равновесия точки, находящейся на расстоянии 75 см от источника колебаний через 0,01 с после начала колебаний. Скорость распространения колебаний 340 м/с.
Задача 11103
Напишите уравнение гармонического колебания, если амплитуда скорости vm = 63 см/с, период колебаний Т = 1 с, смещение точки от положения равновесия в начальный момент времени равно нулю. Найдите амплитуду ускорения и частоту колебаний. Постройте график зависимости смещения от времени.
Задача 12666
На каком ближайшем расстоянии от источника колебаний с периодом 45 мс через время, равное половине периода после включения источника смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний равна 158 м/с. Считать, что в момент включения источника все точки находятся в положении равновесия.
Задача 14576
Уравнение незатухающих колебаний х = 4sin(600πt) см. Найти смещение x от положения равновесия точки, находящейся на расстоянии l = 75 см от источника колебаний, для момента времени t = 0,01с после начала колебаний. Скорость распространения колебаний v = 300 м/с.
Задача 14932
Плоская монохроматическая волна распространяется вдоль оси Y. Амплитуда волны А = 0,05 м. Считая, что в начальный момент времени смещение точки Р, находящейся в источнике, максимально, определить смещение от положения равновесия точки М, находящейся на расстоянии у = λ/2 от источника колебаний в момент времени t = T/6.
Задача 15330
Смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника колебаний, в момент времени Т/6 равно половине амплитуды. Найти длину бегущей волны.


Задача 17372
Начальная фаза гармонического колебания ψ = 0. При смещении точки от положения равновесия х1 = 2,4 см скорость точки v1 = 3 см/с, а при смещении х2 = 2,8 см ее скорость v2 = 2 см/с. Найти амплитуду А и период Т этого колебания.
Задача 19324
На каком расстоянии от источника колебаний, совершаемых по закону синуса, в момент времени t = T/2 смещение точки от положения равновесия равно половине амплитуды? Скорость распространения колебаний 340 м/с. Период колебаний 10–3 с.
Задача 19326
Источник плоских волн совершает колебания по закону x = A cos ωt. Через четверть периода после начала колебаний смещение от положения равновесия точки, находящейся на расстоянии 4 см от источника, равно половине амплитуды. Найти длину бегущей волны.
Задача 19327
Источник плоских волн совершает колебания по закону x = A cos ωt. Какова амплитуда колебаний, если смещение от положения равновесия точки, отстоящей от источника на расстоянии λ/12 для момента времени T/4, равно 0,025 м?
Задача 20380
Определить начальную фазу колебаний, которые происходят по закону косинуса, если максимальная скорость равна 16 см/с, период колебаний 1,4 с, а смещение точки от положения равновесия в начальный момент времени составляет 2,84 см.
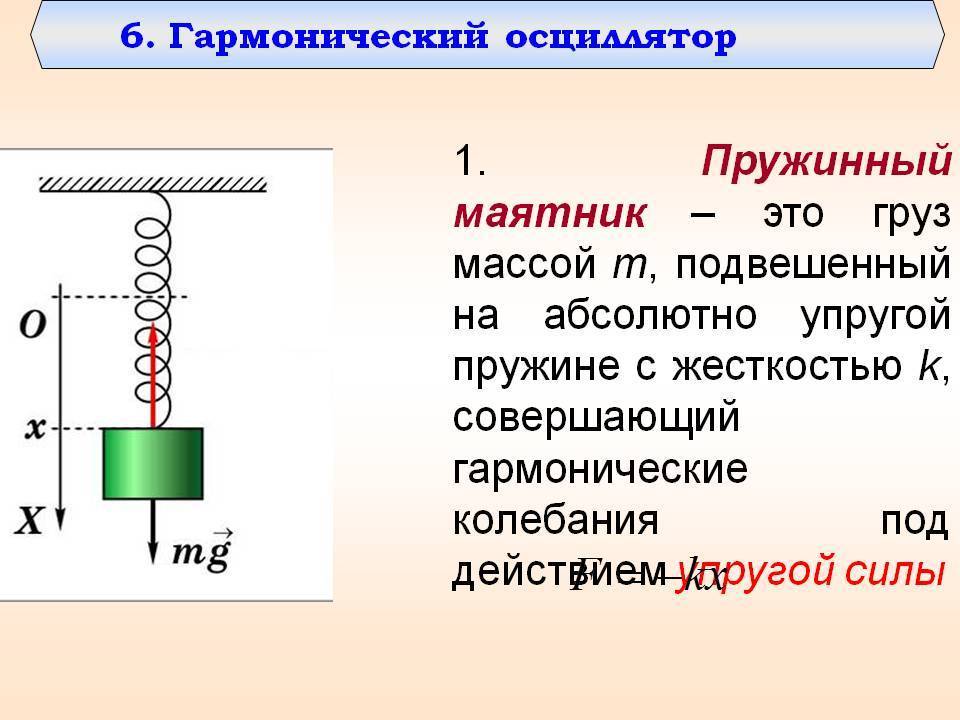
Сила упругости в пружинном маятнике
Следует учитывать тот момент, что до деформирования пружины она находится в положении равновесия. Приложенная сила может приводить к ее растягиванию и сжиманию. Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Выделяют довольно большое количество особенностей воздействия силы упругости в пружинном маятнике. Среди особенностей отметим:
- Максимальная сила упругости возникает на момент, когда тело находится на максимальном расстоянии от положения равновесия. При этом в подобном положении отмечается максимальное значение ускорение тела. Не следует забывать о том, что может проводится растягивание и сжатие пружины, оба варианта несколько отличается. При сжатии минимальная длина изделия ограничивается. Как правило, она имеет длину, равную диаметру витка умноженное на количество. Слишком большое усилие может стать причиной смещения витков, а также деформации проволоки. При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние.
- При сближении тела к месту равновесия происходит существенное уменьшение длины пружины. За счет этого наблюдается постоянное снижение показателя ускорения. Все это происходит за счет воздействия усилия упругости, которая связано с типом применяемого материала при изготовлении пружины и ее особенностями. Длина уменьшается за счет того, что расстояние между витками снижается. Особенностью можно назвать равномерное распределение витков, лишь только в случае дефектов есть вероятность нарушения подобного правила.
- На момент достижения точки равновесия сила упругости снижается до нуля. Однако, скорость не снижается, так как тело движется по инерции. Точка равновесия характеризуется тем, что длина изделия в ней сохраняется на протяжении длительного периода при условии отсутствия внешнего деформирующего усилия. Точка равновесия определяется в случае построения схемы.
- После достижения точки равновесия возникающая упругость начинает снижать скорость перемещения тела. Она действует в противоположном направлении. При этом возникает усилие, которое направлено в обратную сторону.
- Дойдя крайней точки тело начинает двигаться в противоположную сторону. В зависимости от жесткости установленной пружины подобное действие будет повторятся неоднократно. Протяженность этого цикла зависит от самых различных моментов. Примером можно назвать массу тела, а также максимальное приложенное усилие для возникновения деформации. В некоторых случаях колебательные движения практически незаметны, но они все же возникают.
Приведенная выше информация указывает на то, что колебательные движения совершаются за счет воздействия упругости. Деформация происходит за счет приложенного усилия, которое может варьировать в достаточно большом диапазоне, все зависит от конкретного случая.
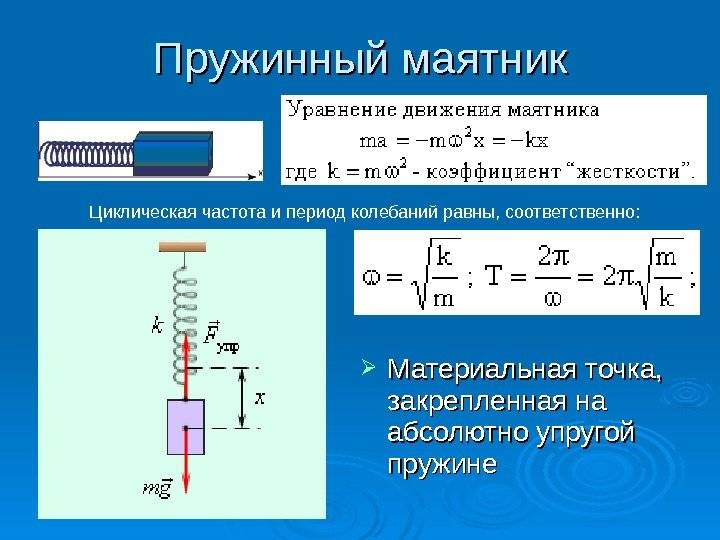
Что такое пружинный маятник
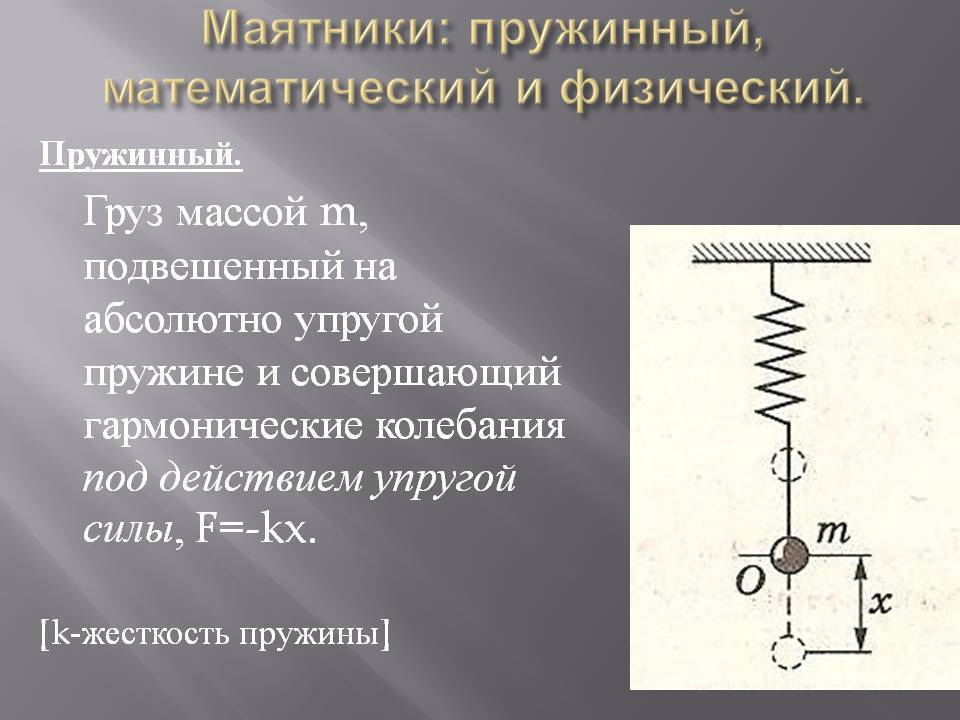
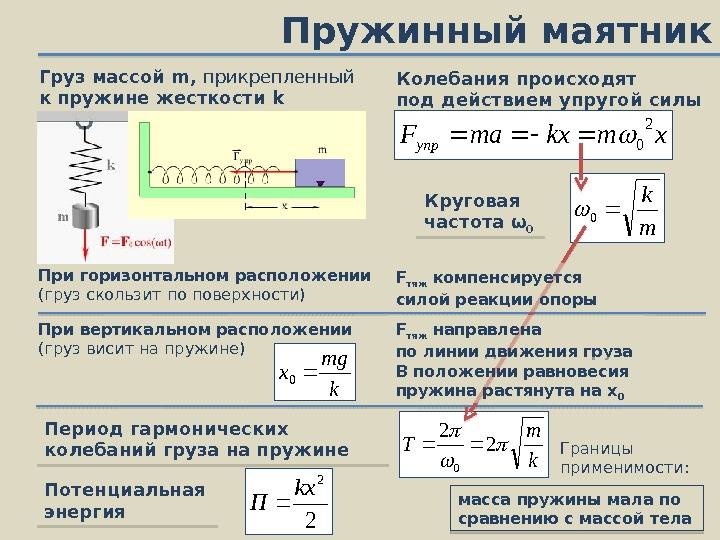
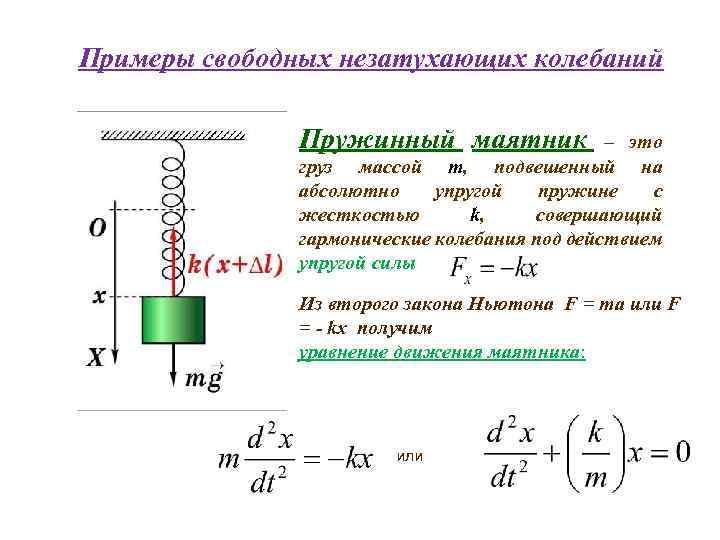
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
- m — масса тела;
- k — коэффициент жесткости пружины.
Общий вид маятника:
Особенностями пружинных маятников являются:
- Сочетание тела и пружины.
Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки;
- У любой пружины есть исходное положение, предел сжатия и растяжения.
При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация;
- Полная механическая энергия появляется с началом процесса обратимого деформирования.
В этот момент на объект не оказывает действие сила упругости;
- Колебательные движения происходят под влиянием силы упругости.
Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях;
- От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения.
Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.
Период колебаний
Сравнивая несколько последовательных колебаний, можно увидеть, что они очень похожи. При этом каждое колебание длится одинаковое время.
Время, необходимое для возникновения простого колебания, называется периодом колебания. Он обозначается заглавной латинской буквой $T$.
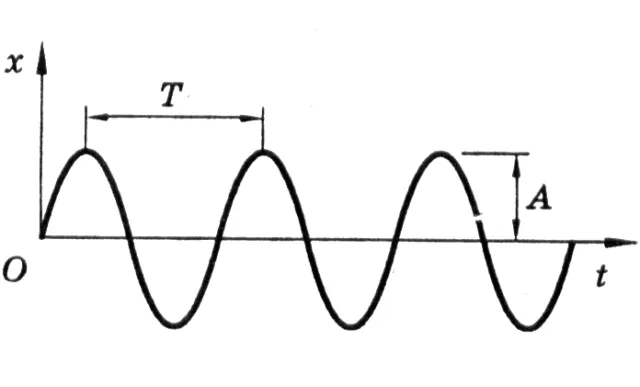
Рисунок 3: Период колебаний на графике.
Напомним, что в системе СИ время измеряется в секундах. Если период слишком мал, берутся дробные единицы миллисекунд (мс, $ 10 ^ $ секунд), микросекунд (мкс, $ 10 ^ $ секунд) и наносекунд (нс, $ 10 ^ $ секунд).
Как правило, не всегда легко определить период отдельных колебаний маятника, так как он постоянно находится в движении. Однако, поскольку все колебания маятника одинаковы, для определения периода колебаний можно провести расчеты нескольких колебаний.
Формула для периода колебаний выглядит следующим образом
Можно быстро различить периоды колебаний от 50 микросекунд (самый громкий) до десятилетий (например, 12 лет — один год для Юпитера). С помощью как экономики, так и технологии можно испытать периоды колебаний от $ 10 ($ нс (период рентгеновских лучей) до 250 миллионов лет (время вращения Солнечной системы вокруг центра нашей галактики).
Частота колебаний — это количество полных колебаний в единицу времени. Символ обозначается в ᢙ (ᢙ ню \), а единица времени — с -1 или Гц (Герц).
1 Гц — это частота колебательного движения, при котором одно полное колебание происходит в секунду.
Период и частота колебаний взаимно обратны.
Частота периода — это число колебаний за 2π секунды. Название ᢙ (ᢙ омега \) и единица измерения — рад/с.





